|
AUTh-ARL Core Stack
0.7
|
|
AUTh-ARL Core Stack
0.7
|
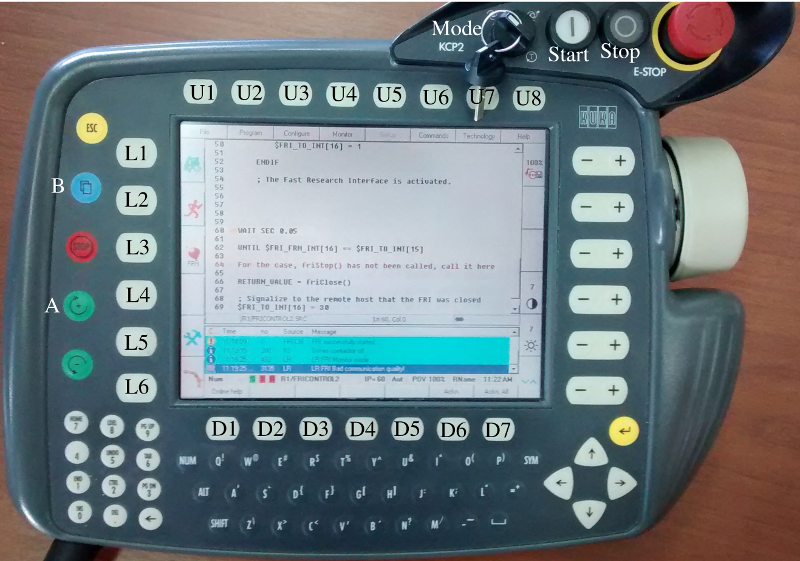
In order to define a new tool for the robot follow:
For defining the new tool frame:
Setup (U5) > Measure > Tool > Numeric Input
For defining the mass properties of the tool:
Setup (U5) > Measure > Tool > Payload Data
First if you don't know the tool number you can see the available tools by
Configure (U3) > Set tool/base
TODO
Set the tool frame for manual mode:
Configure (U3) > Set tool/base
In order to define a tool for running in automatic mode (e.g. running a program with FRI) first
FRIL/FRIControl2Log on as expert:
Configure (U3) > User Group > Log on as expert
Unfold the code of the script :
Program (U2) > Fold > All folds open
Change inside the FRIL/FRIControl2 script the rate in line 129.
In order to run in automatic mode (e.g. use the FRI) everytime you want to run the FRI do the following
FRI (L3) > FRICLOSE (D3)Program (U2) > Reset ProgramKUKA arm icon (L6) > Position (D2)Start buttonThe above assume that you have already selected the desired script (FRIL/FRIControl2).
After you have finished your work on the robot always park the robot in its home position:
kostas/gohome 1.8.6
1.8.6 
