|
AUTh-ARL Core Stack
0.7
|
|
AUTh-ARL Core Stack
0.7
|
A class which implements a controller for robot visualization in RViz. More...
#include <ros_state_publisher.h>
Public Member Functions | |
| RosStatePublisher (std::shared_ptr< robot::Robot > r, const std::string &joint_state_topic="/autharl_joint_state", double rate=50, const std::string &frame="world", const std::string &topic="/autharl_viz") | |
| The default constructor. More... | |
| RosStatePublisher (std::shared_ptr< robot::Robot > r, std::shared_ptr< robot::Sensor > s, const std::string &joint_state_topic="/autharl_joint_state", double rate=50, const std::string &frame="world", const std::string &topic="/autharl_viz") | |
| The default constructor. More... | |
| void | measure () |
| Measures the current state of the robot (Joint Positions). More... | |
| void | command () |
| Publishes the measured joint positions and other data in RViz. More... | |
| virtual void | update () |
| Updates ROS data structures with the readings from the robot. More... | |
| bool | stop () |
| The stop condition of the controller which is that ROS is ok. More... | |
| void | setFrame (const std::vector< arma::mat > &f) |
| Sets a number of frames for visualization. More... | |
| void | setVector (const std::vector< std::pair< arma::vec, arma::vec >> &v) |
| void | waitNextCycle () |
| Sets a new reference for the controller. More... | |
 Public Member Functions inherited from arl::robot::Controller Public Member Functions inherited from arl::robot::Controller | |
| Controller (std::shared_ptr< Robot > r, const std::string &name, Timing timing=FIXED) | |
| Constructor which initializes the robot controller. More... | |
| ~Controller () | |
| bool | run () |
| The main function that runs the controller. More... | |
| bool | runRT () |
| Runs the controller with real time priority. More... | |
| void | setExternalStop (bool arg) |
| Sets an external stop to the controller. Another external thread can use this function to stop the controller. More... | |
| std::string | getName () |
| Returns the name of the controller. More... | |
| double | getTime () const |
| Returns the current time since the start of the controller in seconds. More... | |
| virtual void | enableLogging (const std::string &log_path="/home/user/autharl_logfiles/") |
| Enables the logging by opening files for log benchmarking times and data. More... | |
| virtual void | reference (const arma::mat &ref) |
Protected Attributes | |
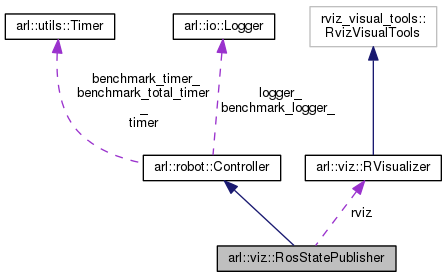
| viz::RVisualizer | rviz |
| ros::Rate | loop_rate |
| Protected Attributes inherited from arl::robot::Controller | |
| std::string | name |
| The name of the controller. More... | |
| bool | external_stop |
| The external stopped setted by Controller::setExternalStop() More... | |
| std::shared_ptr< Robot > | robot |
| The pointer to the robot to be controlled. More... | |
| double | t |
| The current time t, with t = 0 when the controller is created. Alternatively the user can initialize time durint the init() function of its derived controller. More... | |
| double | dt |
| The cycle time of the control loop, obtained by the robot. More... | |
| bool | stop_flag_ |
| utils::Timer | timer |
| Used for measuring the current time of the controller. More... | |
| utils::Timer | benchmark_total_timer_ |
| utils::Timer | benchmark_timer_ |
| io::Logger | benchmark_logger_ |
| io::Logger | logger_ |
| Timing | timing_ |
Additional Inherited Members | |
| Public Types inherited from arl::robot::Controller | |
| enum | Timing { FIXED, DYNAMIC } |
| Protected Member Functions inherited from arl::robot::Controller | |
| virtual void | init () |
| Initializes the controller. More... | |
| virtual bool | success () |
| Implements the success condition of your controller. More... | |
A class which implements a controller for robot visualization in RViz.
|
explicit |
The default constructor.
| r | A pointer to the robot for visualization |
| rate | The rate for the visualization in Hz. Defaults to 50 Hz. |
| frame | The base frame that which data will be expressed. Defaults to "world". |
| topic | The topic that RViz reads for the data. Defaults to "/autharl_viz". |
|
explicit |
The default constructor.
| r | A pointer to the robot for visualization |
| rate | The rate for the visualization in Hz. Defaults to 50 Hz. |
| frame | The base frame that which data will be expressed. Defaults to "world". |
| topic | The topic that RViz reads for the data. Defaults to "/autharl_viz". |
|
virtual |
Publishes the measured joint positions and other data in RViz.
Reimplemented from arl::robot::Controller.
|
virtual |
Measures the current state of the robot (Joint Positions).
Reimplemented from arl::robot::Controller.
| void arl::viz::RosStatePublisher::setFrame | ( | const std::vector< arma::mat > & | f | ) |
Sets a number of frames for visualization.
Another thread can use this function in order to visualize a set of frames in the given loop rate.
| f | The frames for visualization |
| void arl::viz::RosStatePublisher::setVector | ( | const std::vector< std::pair< arma::vec, arma::vec >> & | v | ) |
|
virtual |
The stop condition of the controller which is that ROS is ok.
Reimplemented from arl::robot::Controller.
|
virtual |
Updates ROS data structures with the readings from the robot.
Implements arl::robot::Controller.
|
virtual |
Sets a new reference for the controller.
Implemented according to your controller needs. The data has the form of an armadillo matrix which can contain any reference signal.
| ref | The data reference in the form of a matrix |
Reimplemented from arl::robot::Controller.
|
protected |
|
protected |
 1.8.6
1.8.6 
