|
Flat Object Grasping Library (FOG)
0.2.1
|
|
Flat Object Grasping Library (FOG)
0.2.1
|
The main class of FOG which implements the pipeline for grasping a flat object. More...
#include <fog/flat_object_grasper.h>
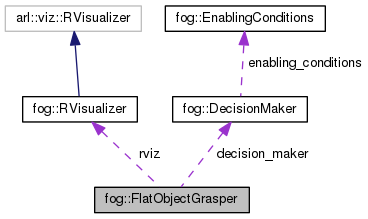
 Collaboration diagram for fog::FlatObjectGrasper:
Collaboration diagram for fog::FlatObjectGrasper:Public Member Functions | |
| FlatObjectGrasper (const std::shared_ptr< Interface > &interface) | |
| ~FlatObjectGrasper () | |
| void | graspObject () |
| Grasps a flat object. Call this function to initiate the pipeline. More... | |
Protected Attributes | |
| DecisionMaker | decision_maker |
| RVisualizer | rviz |
| std::shared_ptr< Interface > | external_interface |
| std::shared_ptr < arl::robot::Controller > | reach_pgs |
| std::shared_ptr < arl::robot::Controller > | reach_fgs |
| std::shared_ptr < arl::robot::Controller > | finger_compliance |
The main class of FOG which implements the pipeline for grasping a flat object.
| fog::FlatObjectGrasper::FlatObjectGrasper | ( | const std::shared_ptr< Interface > & | interface | ) |
| fog::FlatObjectGrasper::~FlatObjectGrasper | ( | ) |
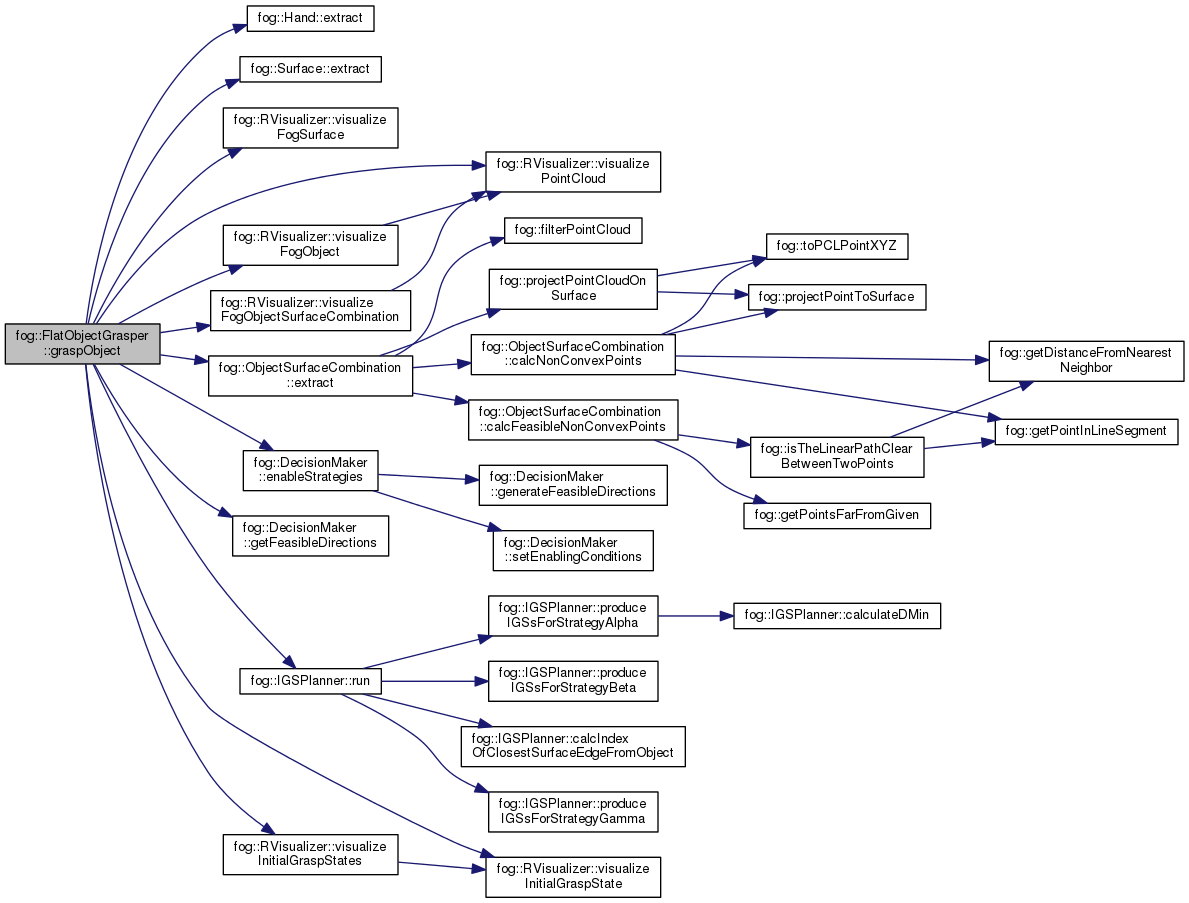
| void fog::FlatObjectGrasper::graspObject | ( | ) |
Grasps a flat object. Call this function to initiate the pipeline.
Here is the call graph for this function:
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
 1.8.6
1.8.6