|
Flat Object Grasping Library (FOG)
0.2.1
|
|
Flat Object Grasping Library (FOG)
0.2.1
|
Abstract class which defines the interfaces with FOG. More...
#include <fog/interface.h>
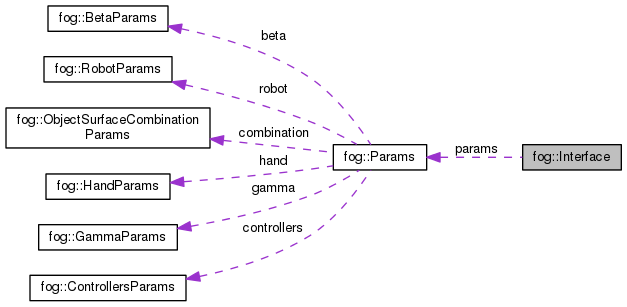
 Collaboration diagram for fog::Interface:
Collaboration diagram for fog::Interface:Public Member Functions | |
| Interface () | |
| Interface (const std::shared_ptr< arl::robot::Robot > &the_arm, const std::shared_ptr< arl::robot::Robot > &the_hand, const std::shared_ptr< arl::robot::Sensor > &sensor, const std::shared_ptr< arl::viz::RosStatePublisher > &the_viz) | |
| virtual void | getParameters ()=0 |
| Reads the parameters for FOG. More... | |
| virtual PointCloud | getObjectPointCloud ()=0 |
| Returns the point cloud of the object. More... | |
| virtual std::vector< Point3 > | getSurfaceEdges ()=0 |
| Returns the eges of the support surface. More... | |
| virtual void | reachIGS (const fog::InitialGraspState &igs)=0 |
| Communicates with the robot in order to reach and IGS. More... | |
| virtual bool | planIGS (fog::InitialGraspState &igs)=0 |
| Interfacing with an external planner for planning an IGS. More... | |
| virtual void | robotGoHome ()=0 |
| Sends the robot to the home configuration. More... | |
| virtual Pose | getTipPalmTransform (const Eigen::VectorXd &joint_states)=0 |
| Reads the tranformation for the tip of the hand to the palm of the hand. More... | |
| virtual void | setHandConfiguration (const Eigen::VectorXd &joint_states, double duration=5.0, bool blocking=true)=0 |
| Communicates with the hand for reaching a hand configuration/preshape. More... | |
| virtual fog::Pose | getTransformationFromPalm (fog::FrameLabel frame, const Eigen::VectorXd &joint_states)=0 |
| Provides the transformation of the given frame w.r.t. the palm (or the base of the hand). More... | |
Public Attributes | |
| std::shared_ptr < arl::robot::Robot > | arm |
| std::shared_ptr < arl::robot::Robot > | hand |
| std::shared_ptr < arl::robot::Sensor > | ft_sensor |
| std::shared_ptr < arl::viz::RosStatePublisher > | viz |
| Params | params |
| The FOG params in order to be available to the components of the library. More... | |
Abstract class which defines the interfaces with FOG.
You can inherit and implement this class in order to define your own interfaces with the rest of the world.
|
inline |
|
inline |
|
pure virtual |
Returns the point cloud of the object.
There are multiple ways to implement this. For example you can read the point cloud from a file or from a ROS topic.
|
pure virtual |
Reads the parameters for FOG.
Writes the parameters to the fog::Interface::params
|
pure virtual |
Returns the eges of the support surface.
|
pure virtual |
Reads the tranformation for the tip of the hand to the palm of the hand.
| joint_states | The desired joint position for finding the forward kinematics of the fingertip. |
|
pure virtual |
Provides the transformation of the given frame w.r.t. the palm (or the base of the hand).
| frame | The frame to find its transformation from the palm frame. |
| joint_states | The joint positions of the fingers in order to solve the F/K. |
|
pure virtual |
Interfacing with an external planner for planning an IGS.
You can use any planner you want, for example MoveIt!.
| igs | The IGS to be planned. If the planner found a plan for the given IGS this function should write the solution on the fog::InitialGraspState::joint_trajectory_solution |
|
pure virtual |
Communicates with the robot in order to reach and IGS.
You have to send to the robot the joint trajectory solution of the IGS.
| The | IGS to be reached. |
|
pure virtual |
Sends the robot to the home configuration.
|
pure virtual |
Communicates with the hand for reaching a hand configuration/preshape.
It reads the current configuration of the hand and sends a joint trajectory to the finger joints.
| joint_states | The desired final joint states of the preshape. |
| duration | The duration of the joint trajectory |
| blocking | True if the program should wait for the fingertips to reach the final joint configuration. False otherwise. |
| std::shared_ptr<arl::robot::Robot> fog::Interface::arm |
| std::shared_ptr<arl::robot::Sensor> fog::Interface::ft_sensor |
| std::shared_ptr<arl::robot::Robot> fog::Interface::hand |
| Params fog::Interface::params |
The FOG params in order to be available to the components of the library.
| std::shared_ptr<arl::viz::RosStatePublisher> fog::Interface::viz |
 1.8.6
1.8.6