|
Flat Object Grasping Library (FOG)
0.2.1
|
|
Flat Object Grasping Library (FOG)
0.2.1
|
The namespace having all the FOG codebase. More...
Classes | |
| class | FingerCompliance |
| Implements a controller for active compliance of the hand's fingers. More... | |
| class | ReachFGSAlpha |
A class that implements the controller for reaching the FGS state for the strategy-  . It closes the fingers. More... . It closes the fingers. More... | |
| class | ReachFGSBeta |
A class that implements the controller for reaching the FGS state for the strategy-  . It closes the fingers and moves the arm. More... . It closes the fingers and moves the arm. More... | |
| class | ReachPGSBeta |
| A class that implements the controller for reaching the PGS state. It reads feedback from the position of the fingeres and commands the task velocity of the arm. More... | |
| class | UpdateBHand |
| class | DecisionMaker |
| Decides which of the available grasp strategies can be used for grasping the target object, given the current scene. More... | |
| class | EnablingConditions |
| The enabling conditions for the Decision Making. More... | |
| class | EnabledStrategies |
| The enabled strategies from the Decision Making. More... | |
| class | FlatObjectGrasper |
| The main class of FOG which implements the pipeline for grasping a flat object. More... | |
| class | Hand |
| Represents the robotic hand as it is considered in the FOG framework. More... | |
| class | IGSPlanner |
| Plans Initial Grasping States (IGSs) for each selected grasp strategy. More... | |
| class | InitialGraspState |
| Representing and Initial Grasp State. More... | |
| class | Interface |
| Abstract class which defines the interfaces with FOG. More... | |
| class | Models |
| The FOG Models. More... | |
| class | Object |
| Represents the target object as it is considered in the FOG framework. More... | |
| class | ObjectSurfaceCombination |
Represents the object-surface combination as it is considered in the FOG framework, i.e. the set of non-convex directions  . More... . More... | |
| struct | HandParams |
| class | ObjectSurfaceCombinationParams |
| Parameters related to the FOG object-surface combination. More... | |
| struct | ControllersParams |
| class | RobotParams |
| Parameters related to the robot configuration that is used. If it is real or a simulated hardware. More... | |
| class | BetaParams |
| Parameters related to strategy- . More... | |
| class | GammaParams |
Parameters related to strategy-  . More... . More... | |
| class | Params |
| The FOG parameters. More... | |
| class | Surface |
| Represents the support surface as it is considered in the FOG framework, as rectangle with 4 limits. More... | |
| class | RVisualizer |
| Visualizes in RViz FOG models. In order to see the models, add in your RViz configuration a PointCloud2 panel with the point cloud topic name and a MarkerArray with the rviz_topic that you initialize the class. More... | |
Typedefs | |
| typedef pcl::PointCloud < pcl::PointXYZ > | PointCloud |
The type used by FOG as a Point Cloud (  ) More... ) More... | |
| typedef Eigen::Vector3d | Point3 |
The type used by FOG as a Point in 3D space (  ) More... ) More... | |
| typedef Eigen::Vector3d | Vector3 |
| The type used by FOG as a Vector in 3D space ( ) More... | |
| typedef Eigen::Affine3d | Pose |
The type used by FOG as a Vector as a P (  ) More... ) More... | |
| typedef Eigen::Quaterniond | Quaternion |
| The type used by FOG as a Vector as a P ( ) More... | |
Enumerations | |
| enum | Strategy { ALPHA, BETA, GAMMA } |
| Lists of the available grasp strategies in FOG. More... | |
| enum | FrameLabel { PALM, TIP1, TIP2, TIP3 } |
| Defines the available frames considered in FOG framework. More... | |
Functions | |
| Point3 | getPointInLineSegment (const Point3 &p1, const Point3 &p2, double lambda) |
| Returns a 3D point in the line segment between two points. More... | |
| void | filterPointCloud (const Eigen::Vector4f &leaf_size, PointCloud &point_cloud) |
| Downsamples a point cloud using PCL's Voxel Grid. More... | |
| Point3 | projectPointToSurface (const Point3 &point, const Point3 &surface_point, const Vector3 surface_normal) |
| Projects orthogonally a 3D point onto a plane given a point of the plane and its normal vector. In implements Eq. (10) [1]. More... | |
| void | projectPointCloudOnSurface (const PointCloud &point_cloud, const Point3 &surface_point, const Vector3 surface_normal, PointCloud &result) |
| Projects a point cloud on to a plane defined by its normal vector and a point which belongs on the plane. More... | |
| pcl::PointXYZ | toPCLPointXYZ (const Eigen::Vector3d &eigen) |
| Mapping of an Eigen Vector to a PCL Point XYZ. More... | |
| double | getDistanceFromNearestNeighbor (const PointCloud::Ptr &cloud, const Point3 &point) |
| Returns the minimum distance of the given point from the given point cloud, using a K-NN Search for one neighbor. More... | |
| std::vector< Point3 > | getPointsFarFromGiven (const Point3 &point, double radius, const Vector3 &normal, unsigned int nr_points) |
Provides points far from the one by sampling a circular curve with radius r, centered in the given point and parallel to the plane which is defined by its normal. Implements the set  of Eq. (13) More... of Eq. (13) More... | |
| bool | isTheLinearPathClearBetweenTwoPoints (const Point3 &p1, const Point3 &p2, const PointCloud::Ptr &point_cloud, double dlambda, double mu) |
| Checks if the linear path is clear betweein two points. More... | |
| void | graspObject () |
| void | extractBoundingBox (const PointCloud &point_cloud, Eigen::Vector3d &translation, Eigen::Quaterniond &rotation, Eigen::Vector3d &dimensions) |
| Extracts the oriented bounding box of the given point cloud. More... | |
| std::ostream & | operator<< (std::ostream &s, const EnabledStrategies &strategies) |
| std::ostream & | operator<< (std::ostream &s, const EnablingConditions &e) |
| std::ostream & | operator<< (std::ostream &s, const Hand &hand) |
| std::ostream & | operator<< (std::ostream &s, const Object &object) |
| std::ostream & | operator<< (std::ostream &s, const Surface &surface) |
The namespace having all the FOG codebase.
| typedef Eigen::Vector3d fog::Point3 |
The type used by FOG as a Point in 3D space ( )
| typedef pcl::PointCloud<pcl::PointXYZ> fog::PointCloud |
The type used by FOG as a Point Cloud ( )
| typedef Eigen::Affine3d fog::Pose |
The type used by FOG as a Vector as a P ( )
| typedef Eigen::Quaterniond fog::Quaternion |
The type used by FOG as a Vector as a P ( )
| typedef Eigen::Vector3d fog::Vector3 |
The type used by FOG as a Vector in 3D space ( )
| enum fog::FrameLabel |
| enum fog::Strategy |
| void fog::extractBoundingBox | ( | const PointCloud & | point_cloud, |
| Eigen::Vector3d & | translation, | ||
| Eigen::Quaterniond & | rotation, | ||
| Eigen::Vector3d & | dimensions | ||
| ) |
Extracts the oriented bounding box of the given point cloud.
| point_cloud | The point cloud as input. |
| translation | The translation of the bounding box as output. |
| rotation | The orientation of the bounding box as output. |
| dimensions | The dimensions of the bounding box (x, y, z) wrt its own reference frame |
| void fog::filterPointCloud | ( | const Eigen::Vector4f & | leaf_size, |
| PointCloud & | point_cloud | ||
| ) |
Downsamples a point cloud using PCL's Voxel Grid.
| leaf_size | The leaf size for the Voxel Grid in meters. It denotes the volume (x, y, z) which will include one point. |
| point_cloud | The point cloud to be sampled. This is the output. |
| double fog::getDistanceFromNearestNeighbor | ( | const PointCloud::Ptr & | cloud, |
| const Point3 & | point | ||
| ) |
Returns the minimum distance of the given point from the given point cloud, using a K-NN Search for one neighbor.
| cloud | The point cloud |
| point | The point |
|
inline |
Returns a 3D point in the line segment between two points.
Implements the line segment: ![$ [\mathbf{p_1}, \mathbf{p_2}] = \{\mathbf{p} \in \mathbb{R}^3 \; | \; \mathbf{p} = (1-\lambda)\mathbf{p}_1 + \lambda \mathbf{p}_2, 0 \leq \lambda \leq 1\} $](form_10.png)
| p1 | The first point of the line segment. |
| p2 | The second point of the line segment. |
| lambda | The value of the parameter  |
| std::vector< Point3 > fog::getPointsFarFromGiven | ( | const Point3 & | point, |
| double | radius, | ||
| const Vector3 & | normal, | ||
| unsigned int | nr_points | ||
| ) |
Provides points far from the one by sampling a circular curve with radius r, centered in the given point and parallel to the plane which is defined by its normal. Implements the set of Eq. (13)
| point | The given point. |
| radius | The radius of the circle to be sampled. |
| normal | The normal vector of the plane of the circle. |
| no_of_points | The number of points to be produced |
| void fog::graspObject | ( | ) |
| bool fog::isTheLinearPathClearBetweenTwoPoints | ( | const Point3 & | p1, |
| const Point3 & | p2, | ||
| const PointCloud::Ptr & | point_cloud, | ||
| double | dlambda, | ||
| double | mu | ||
| ) |
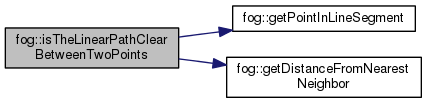
Checks if the linear path is clear betweein two points.
Creates a discreate line segment between the two points and tests if the points in the line segments are close to the given point cloud.
| p1 | The first point |
| p2 | The second point |
| point_cloud | A pointer to the point cloud which may obstract the path between p1 and p2 |
| dlambda | The lambda discretization parameter |
| mu | The $f$f parameter denoting when a point is considered close to the point cloud |
 Here is the call graph for this function:
Here is the call graph for this function:| std::ostream& fog::operator<< | ( | std::ostream & | s, |
| const EnabledStrategies & | strategies | ||
| ) |
| std::ostream& fog::operator<< | ( | std::ostream & | s, |
| const Hand & | hand | ||
| ) |
| std::ostream& fog::operator<< | ( | std::ostream & | s, |
| const EnablingConditions & | e | ||
| ) |
| std::ostream& fog::operator<< | ( | std::ostream & | s, |
| const Surface & | surface | ||
| ) |
| std::ostream& fog::operator<< | ( | std::ostream & | s, |
| const Object & | object | ||
| ) |
| void fog::projectPointCloudOnSurface | ( | const PointCloud & | point_cloud, |
| const Point3 & | surface_point, | ||
| const Vector3 | surface_normal, | ||
| PointCloud & | result | ||
| ) |
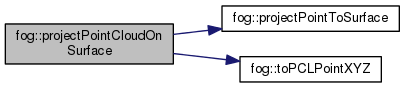
Projects a point cloud on to a plane defined by its normal vector and a point which belongs on the plane.
| point_cloud | The point cloud to be projected |
| surface_point | A point belonging to the surface of the plane |
| surface_normal | The normal vector on the plane |
| result | The resulted projected point cloud |
Here is the call graph for this function:
|
inline |
Projects orthogonally a 3D point onto a plane given a point of the plane and its normal vector. In implements Eq. (10) [1].
| point | The point to be projected. |
| surface_point | A point on the surface's plane |
| surface_normal | The vector of the surface normal |
|
inline |
Mapping of an Eigen Vector to a PCL Point XYZ.
| eigen | The eigen vector |
 1.8.6
1.8.6