|
Flat Object Grasping Library (FOG)
0.2.1
|
|
Flat Object Grasping Library (FOG)
0.2.1
|
Represents the target object as it is considered in the FOG framework. More...
#include <fog/object.h>
Public Types | |
| enum | Type { FLAT = 0, TWODIM = 1, NONFLAT = 2 } |
The type of the object (Flat, Two dimensional or non-flat as defined by function  . More... . More... | |
Public Member Functions | |
| Object (const PointCloud &the_point_cloud) | |
| ~Object () | |
| void | extract (const Surface &surface) |
| Object::Type | checkFlatness (const Surface &surface) |
| std::vector< Eigen::Vector3d > | extractOpposableDirections (const Surface &surface) |
| void | filterPointCloud (const Eigen::Vector4f &leaf_size) |
Public Attributes | |
| std::string | label |
| The name/label of the object, if it is known. More... | |
| pcl::PointCloud< pcl::PointXYZ > | point_cloud |
The full point cloud of the object. Represents the set of points  . More... . More... | |
| Eigen::Vector3d | position |
| The position of the object w.r.t. the world frame. More... | |
| Eigen::Quaterniond | orientation |
| The orientation of the object w.r.t. the world frame. More... | |
| Eigen::Vector3d | bounding_box |
The bounding box of the object. Represents the vector  . More... . More... | |
| std::vector< Eigen::Vector3d > | usable_directions |
The set of the usable directions  . More... . More... | |
| Type | flatness |
Friends | |
| std::ostream & | operator<< (std::ostream &, const Object &) |
Represents the target object as it is considered in the FOG framework.
| enum fog::Object::Type |
| fog::Object::Object | ( | const PointCloud & | the_point_cloud | ) |
|
inline |
| Object::Type fog::Object::checkFlatness | ( | const Surface & | surface | ) |
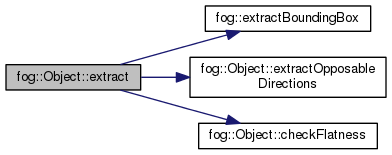
| void fog::Object::extract | ( | const Surface & | surface | ) |
 Here is the call graph for this function:
Here is the call graph for this function:| std::vector< Eigen::Vector3d > fog::Object::extractOpposableDirections | ( | const Surface & | surface | ) |
| void fog::Object::filterPointCloud | ( | const Eigen::Vector4f & | leaf_size | ) |
Here is the call graph for this function:
|
friend |
| Eigen::Vector3d fog::Object::bounding_box |
The bounding box of the object. Represents the vector .
| Type fog::Object::flatness |
| std::string fog::Object::label |
The name/label of the object, if it is known.
| Eigen::Quaterniond fog::Object::orientation |
The orientation of the object w.r.t. the world frame.
| pcl::PointCloud<pcl::PointXYZ> fog::Object::point_cloud |
The full point cloud of the object. Represents the set of points .
| Eigen::Vector3d fog::Object::position |
The position of the object w.r.t. the world frame.
| std::vector<Eigen::Vector3d> fog::Object::usable_directions |
The set of the usable directions .
 1.8.6
1.8.6